命令轴组之工具中心点自当前位置进行插补螺旋运动。终点和辅助点在相对于起始点的指定的坐标系统中定义(终点和辅助点的定义取决于所选的 CircMode 模式),
语法
KsCommandStatus MoveHelicalRelative(
int Index,
McCircMode CircMode,
int Length,
double* AuxPoint,
double* EndPoint,
McCircPathChoice PathChoice,
double Depth,
double Pitch,
double Velocity,
double Acceleration,
double Deceleration,
double Jerk,
McCoordSystem CoordSystem,
McBufferMode BufferMode,
McTransitionMode TransitionMode,
double* TransitionParameter
);参数
Index [in]:轴组索引,索引以零为起点。最多可有 32 个轴组。
CircMode [in]:指定输入信号 AuxPoint 的定义。请见 McCircMode 类型。
Length [in]: AuxPoint 与 EndPoint 阵列的长度。.
AuxPoint [in]:指定坐标系中每个维度的位置阵列 [1..N],其中 N 为 64。这些位置是相对于起点的位置所定义的。
EndPoint [in]:指定坐标系中每个维度的位置阵列 [1..N],其中 N 为 64。这些位置是相对于起点的位置所定义的。
PathChoice [in]:路径的选择。请见 McCircPathChoice 类型。
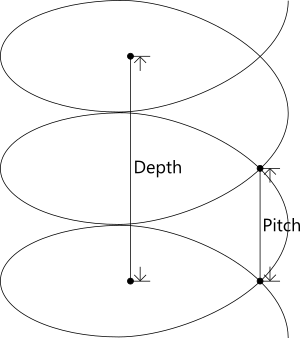
Depth [in]:螺旋线的高度。
Pitch [in]:完整螺旋圈的高度。
Velocity [in]:定义路径中坐标系路径的最大速度,永远为正值,非必要到达,[单位/秒]。
Acceleration [in]:最大加速度,永远为正值,非必要到达,单位由 McProfileType 类型决定,为 [单位/秒2] 或 [秒]。
Deceleration [in]:最大减速度,永远为正值,非必要到达,单位由 McProfileType 类型决定,为 [单位/秒2] 或 [秒]。
Jerk [in]:最大加加速度。永远为正值,非必要到达,单位由 McProfileType 类型决定,为 [单位/秒3] 或 [秒]。
CoordSystem [in]:座标系统,请见 McCoordSystem 类型。
BufferMode [in]:定义如何融合两功能的速度,请见 McBufferMode 类型。
TransitionMode [in]:插入转换曲线。请见 McTransitionMode 类型。
TransitionParameter [in]:转换模式的附加参数,若将 TransitionMode 设为 mcNone,则此参数无效。
回传值
返回 KsCommandStatus 结构。
备注
- 更多关于绝对、相对与附加的运作方式之资讯请见: 概念解说 > 运动。
- 更多关于轴在 McCircMode 模式中的移动方式之资讯请见: 概念解说 > McCircMode。
- Depth 与 Pitch 参数如下图所示:
- 插补的速度是切线速度。
| 顺时针路径 | 逆时针路径 |
|---|---|
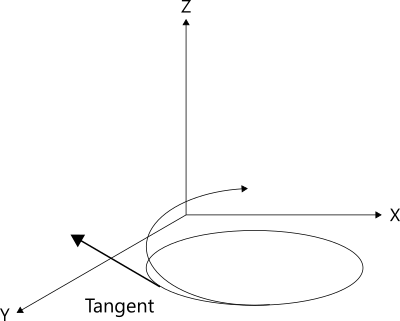
|
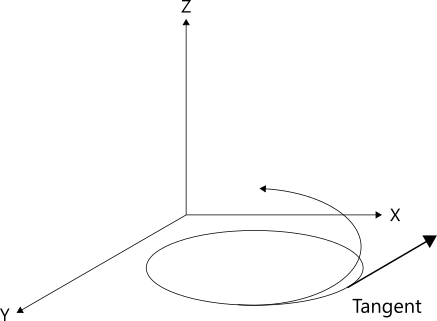
|
范例
N/A使用需求
| RT | Win32 | |
|---|---|---|
| 最低支援版本 | 4.0 | 4.0 |
| 标头档 | ksmotion.h | ksmotion.h |
| 程式库 | KsApi_Rtss.lib | KsApi.lib |
参见